A Lösungsjäger #21342 foi criada no final de 2022 no Colégio Farroupilha de Porto Alegre, RS. O nome em alemão significa "caçadores de soluções" — refletindo a filosofia da equipe e a história do colégio, entrelaçada com a imigração alemã no Sul do Brasil.
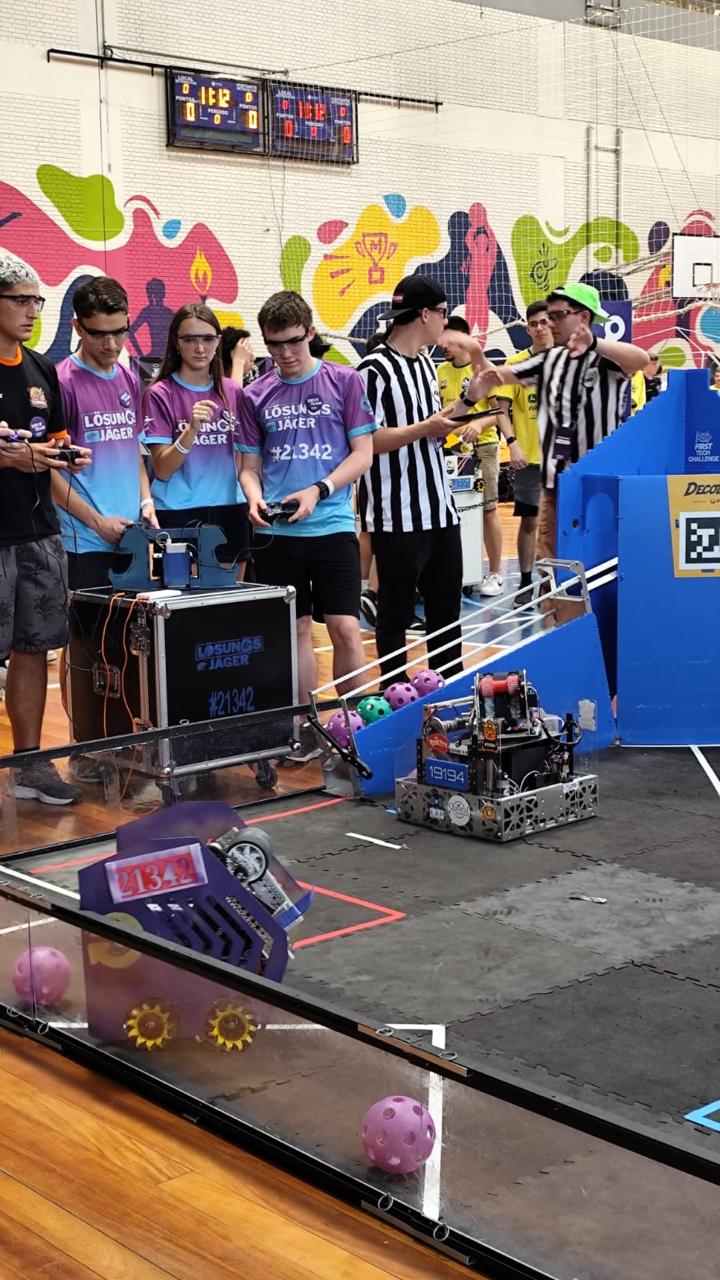
Somos 5 veteranos, 4 júniores e 3 calouros unidos pela paixão por robótica, tecnologia e impacto social. Participamos da FIRST Tech Challenge (FTC), competição para jovens de 14 a 18 anos que desafia a projetar, construir e programar robôs do zero.
Nossa missão é sonhar com um futuro onde ciência e tecnologia impulsionam os limites da condição humana — através da curiosidade, paixão e crescimento.